Canny edge detection
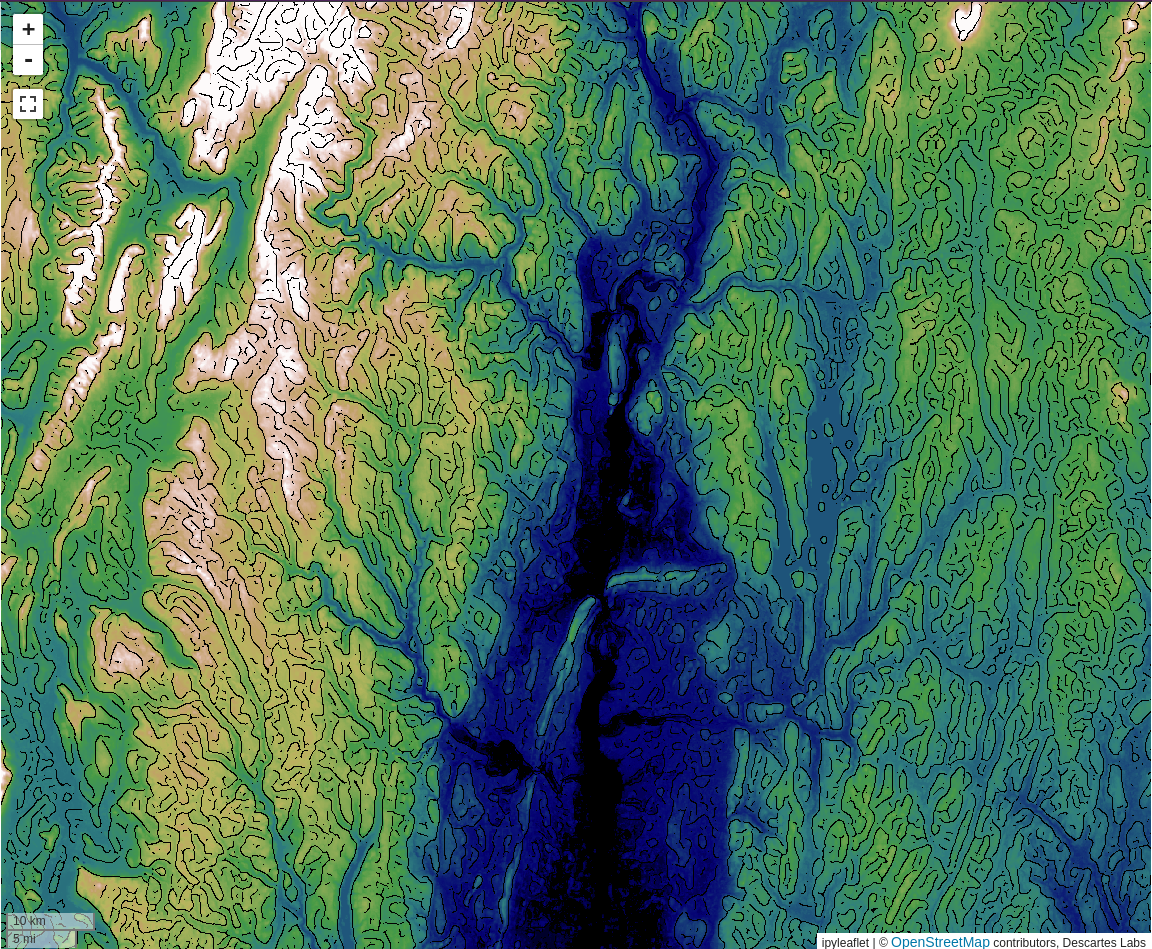
The Canny edge detection tool offers a workflow for generating edges from a band of raster data, suitable for further lineament analysis. Canny edge detection works by smoothing the input data, building gradients for the smoothed data, and thresholding the gradients to determine edges.
Warning
Exporting edges as vectors requires access to Compute.
Tip
More information about Canny edge detection, including the mathematics behind the method, can be found here.
The tool will generate two outputs. When using the dialog, a raster layer is created that will change dynamically when moving the map and changing the parameters for the detection. Clicking detect edges will start a Compute function that will run the detection at the full layer resolution and create a vector layer with the edges for further analysis.
Warning
The created raster layer will use the current map view resolution to generate the edges, not the actual data resolution. For this reason, the edges detected will change as the map is zoomed in and out. The input selector will have an indication of the zoom level that is closest to the true layer resolution.
Select input layer
The Canny edge detection dialog allows you to select the product and an input band to detect edges from.
Note
Canny edge detection only works on one band of data.
Low and high thresholds
The low and high threshold values determine the cutoff points for finding edges in the gradients. In general, lowering these values will allow more points to be classified as edges.
Smoothing sigma
The standard deviation for the Gaussian smoothing kernel. Higher values corresponds to a more aggressive smoothing, which will clean noise in the image at the potential cost of smoothing more edges.
Area of interest
If Compute access is available, select the AOI over which the final vectors will be generated.
Detect edges
When you are happy with the edge detection parameters, click the Detect edges
button to start a Compute task that will compute Vector edges.
Tip
Progress on the Compute task can be found here.
Warning
The vector layer will be added to the map, but will be set to invisible by default. This is to allow Compute tasks to finish before trying to load tiles, which can lead to empty tiles being cached and make the data hard to visualize.